
Силовая часть преобразователя и система управления
Применяемые в различных отраслях промышленности электроприводы можно классифицировать по самым разнообразным критериям, в том числе:
- по мощности приводов,
- по типу применяемых двигателей,
- по параметрам питающего напряжения,
- регулируемые и не регулируемые по скорости приводы.
В регулируемых по скорости промышленных электроприводах, работающих при напряжениях до 1000 В, в основном применяются асинхронные двигатели с короткозамкнутым ротором и двигатели постоянного тока с независимым возбуждением. Конечно же, применяются и другие типы электрических машин: синхронные машины как с обмоткой возбуждения, так и с постоянными магнитами; асинхронные машины с фазным ротором; двигатели постоянного тока с постоянными магнитами, с последовательными обмотками возбуждения; шаговые двигатели.
Для регулирования скорости синхронных и асинхронных машин применяют преобразователи частоты. На рис. 1.1 показана типичная функциональная схема частотно-регулируемого асинхронного электропривода.
Преобразователь частоты UZ выполнен по схеме с промежуточным звеном постоянного тока (управляемый или неуправляемый выпрямитель). За счёт широтно-импульсной модуляции напряжения звена постоянного тока на выходе инвертора формируется основная гармоника выходного переменного напряжения; высшие гармоники подавляются выходным фильтром. Регулирование скорости и момента асинхронного двигателя выполняется за счёт изменения напряжения и частоты выходного напряжения инвертора.
Микропроцессор управляет силовыми IGBTключами преобразователя в соответствии с алгоритмами формирования управляющих импульсов. Для ввода управляющих сигналов и вывода информации о состоянии преобразователя предназначены устройства дискретных и аналоговых входов и выходов, встроенные панели управления, модули подключения к промышленным информационным сетям, порты подключения к персональному компьютеру.
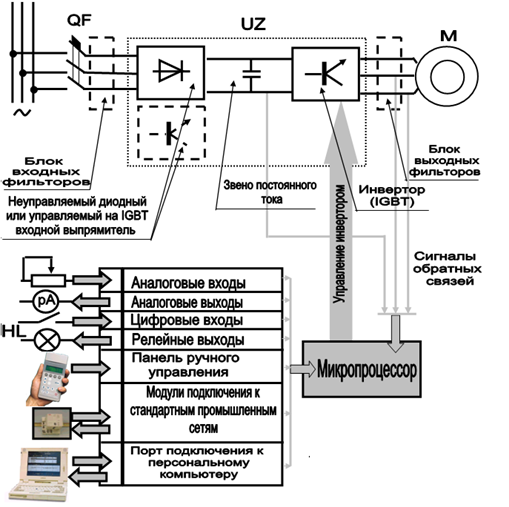
Рис. 1.1. Функциональная схема регулируемого асинхронного электропривода
Для регулирования скорости двигателей постоянного тока наиболее часто применяют тиристорные преобразователи постоянного тока. На рис. 1.2 показана типичная функциональная схема привода постоянного тока.
Для питания якорной цепи двигателя в преобразователе UZ обычно применяются реверсивные или нереверсивные тиристорные выпрямители, выполненные по схеме Ларионова. Для питания цепи возбуждения обычно устанавливаются однофазные полууправляемые тиристорные выпрямители. Регулирование скорости и момента двигателя постоянного тока выполняется за счёт регулирования угла открытия тиристоров выпрямителей в цепях якоря и возбуждения.
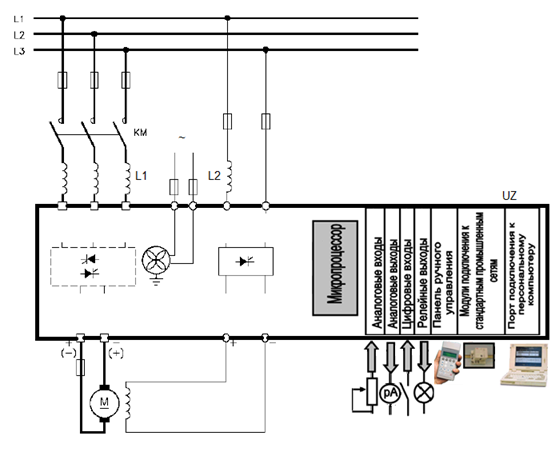
Рис. 1.2. Функциональная схема регулируемого электропривода постоянного тока

POWER Full 14
POWER Full 14
1000
POWER Full 14
POWER Full 14
2000
Нажимая на кнопку, вы даете согласие на обработку персональных данных